● 内置 PID 参数调节功能,使电机能更好地满足不同类型负载的应用需求。
● 内置弱磁控制算法,降低电机高速时的磁场特性,保持功率输出。
● 内置电流矢量控制功能,使电机具有伺服电流特性,发热量低。
● 内置微步指令算法,使电机在各速度阶段保持稳定,低振动。
● 内置 4000 脉冲分辨率编码器反馈,确保电机精度,永不丢步。
| 驱动功能 | 说明 |
|---|---|
| 指令脉冲形式 | 标准 LS 系列驱动器信号接口为脉冲形式,可接收两种类型的脉冲指令信号: 1. 脉冲+方向 (PUL + DIR);2. 双脉冲 (CW + CCW); |
| 输出信号 | 可通过参数设置为报警输出、定位完成输出、抱闸输出;默认为报警输出和定位完成输出。 |
| 控制算法可选 | 领先的空间矢量伺服控制算法和传统的提前角控制算法可选,用户可根据场合任意选择。 |
| 外部显示 | DISPLAY 接口可连接显示器,方便设置参数和观察运行状态。 |
| 信号端宽电压范围 | 脉冲、方向和使能信号输入接口电压 5V 和 24V 独立端子,接线简单,抗干扰能力强。 |
| 7 种状态 LED 显示 | LS 系列驱动器具有 2 种运行状态和 5 种故障 LED 指示功能,让用户能清晰地确认驱动器状态。 |
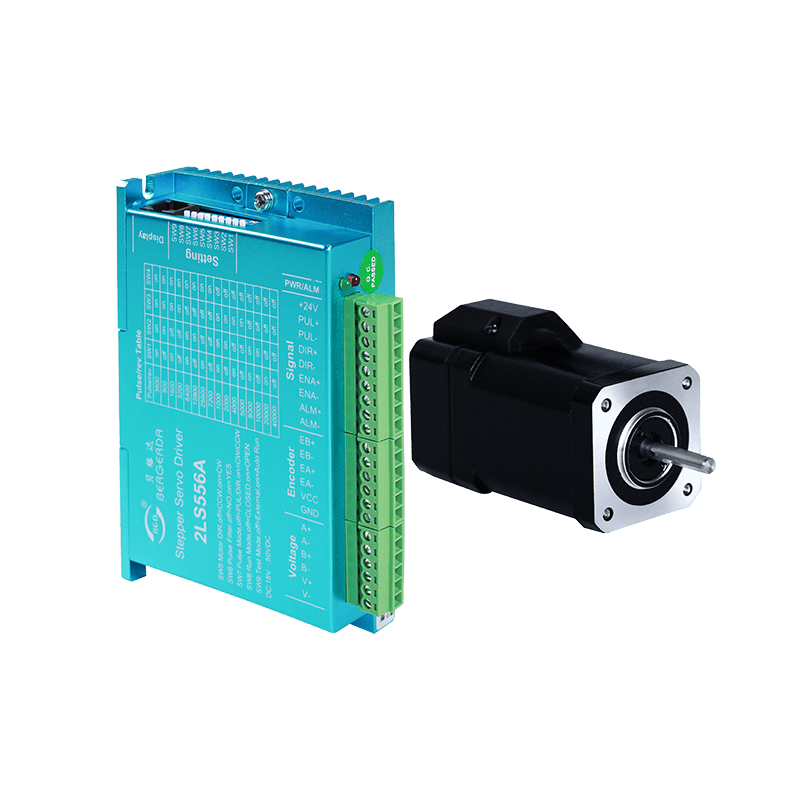
| 电机机座 | 电机型号 | 额定转矩 | 编码器线规格 | 配套驱动型号 |
|---|---|---|---|---|
| 42 | 42BG04-EC | 0.48NM | 引线 3 米 | 2LS556A |
| 42 | 42BG06-EC | 0.72NM | 引线 3 米 | 2LS556A |
| 57 | 57BG10-EC | 1.0NM | 引线 3 米 | 2LS556A |
| 57 | 57BG20-EC | 2.0NM | 引线 3 米 | 2LS556A |
| 60 | 60BG30-EC | 3.0NM | 引线 3 米 | 2LS556A |
| 86 | 86BG40-EC | 4.5NM | 引线 3 米 | 2LS860H |
| 86 | 86BG80-EC | 8.5NM | 引线 3 米 | 2LS860H |
| 86 | 86BG120-EC | 12NM | 引线 3 米 | 2LS860H |
注:
1. 标准型号电机直接引出 3 米编码器线
2. 非标型号闭环电机后缀加 L,如:57BG20-ECL(机身出线长度 500mm),延长线可选其他型号:L-030

| 参数编号 | 定义 | 功能 | 出厂默认值 |
|---|---|---|---|
| 0 | 最大电流值 | 设置驱动器的最大输出电流 | 72 |
| 1 | 轻载电流比例 | 设置轻载时的工作电流与最大电流的比例。在能驱动负载的情况下,设置较低有利于减少电机发热。 | 50 |
| 2 | 输入信号逻辑取反 | 输入取反 | 0 |
| 3 | 输出信号逻辑取反 | 1: 输出口 1 逻辑取反 2: 输出口 2 逻辑取反 | 0 |
| 4 | 输出口 1 功能定义(对应丝印 PEND) | 0: 报警 1: 抱闸 2: 定位完成 | 2 |
| 5 | 输出口 2 功能定义 | 0: 报警 1: 抱闸 2: 定位完成 | 0 |
| 6 | 定位完成范围设置 | 位置偏差低于设定值时输出定位完成信号 | 20 |
| 7 | 编码器线数 | 编码器每圈脉冲数 | 1000 |
| 8 | 位置超差报警设置 | 当位置偏差高于设定值时,驱动器输出位置超差报警 | 4000 |
| 9 | 脉冲指令平滑 | 当输入脉冲频率较低时,设置较大值可使电机运行更平稳(拨码 S6 开关可关闭) | 500 |
| 10 | 驱动比例增益 | 当输入脉冲频率较低时,设置较大值可使电机运行更平稳(拨码 S6 开关可关闭) | 80 |
| 11 | 驱动比例积分 | 15 | |
| 12 | 位置加减速系数 | 0: 无加减速。其他值越小,加减速越慢 | |
| 14 | 使能关断延迟时间 | 关闭使能后,延迟抱闸时间,确保在电机励磁后才松开抱闸 | 100 |
| 15 | 电机动力线调相 | 电机动力调相后,无需改变编码器相序即可实现正常控制。 | 0 |
| 20 | 报警记录 0 | 最近一次报警记录 | 0 |
| 21 | 报警记录 1 | 倒数第二次报警记录 | 0 |
| 27 | 报警记录 7 | 倒数第八次报警记录 | 0 |
| 30 | 驱动器版本 | 106 | |
| 31 | 电机代码 | 42BG04-EC:4 42BG06-EC:3 57BG20-EC:0 86BG80-EC:6 |
| 编号 | 内容 | 定义 |
|---|---|---|
| 1 | r | 转速 |
| 2 | i | 电流 |
| 3 | c | 指令位置 |
| 4 | E | 编码器反馈位置 |
| 5 | d | 位置偏差 |
| 6 | d . | 加减速后的位置偏差 |
| 7 | IO | 输入输出信号状态,从右向左显示。数码管上半部分亮灭表示:d1:使能 d2:方向 d3:脉冲 d5:输出1 d6:输出2 |
| 8 | EE-OP | 按 Enter 键恢复默认值,需要一段时间 |
| 9 | PA | 显示并修改单个参数 |